|
Einige Tipps zum Umbau eines Fahrrades zum
Elektrofahrrad |
|
1.
Grundprinzip |
online-shop | home | Akkubau | Akkus,
Ladegeräte, BMS Systeme | Einspeichen | Beleuchtung Bildergalerie Löten | Schweißen | Punktschweißgerät
| Solares
Laden | Motordemontage | Links
| Spende
| Impressum |
Beim Umbau
eines Fahrrades zum Elektrofahrrad (oder Pedelec, pedal electric cycle) wird
gewöhnlich die vorhandene Vorder- oder Hinterradnabe gegen einen Nabenmotor
ausgetauscht. (Ähnlich wie bei einem Nabendynamo.) Die Motoren sind meistens
Drehstrommotoren, erkennbar an 3 dicken Stromkabeln. Drehstrommotoren haben den
Vorteil, das sie bürstenlos sind, also keine elektrischen Verschleißteile
besitzen.
Zur
Energieversorgung des Motors dienen heute gewöhnlich Lithium Ionen Akkus, die
die elektrische Energie als Gleichstrom speichern. Pro Kg Akkugewicht kann man
Energie für etwa 20 - 30 Kilometer Reichweite speichern.
Um den
Gleichstrom des Akkus in Drehstrom für den Motor umzuwandeln, benötigt man
außerdem ein Steuergerät oder „Controller“. Zusätzlich muss an diesen
Controller noch ein Gasgriff und/oder ein Tretsensor angeschlossen werden, um
den Motor überhaupt regeln zu können.
Der
Gasgriff (oder -hebel) funktioniert ähnlich wie beim Mofa; durch Drehen am
Gasgriff kann man den Motor stufenlos von Null bis Vollgas regeln. (Allerdings
ist diese Art der Steuerung in D nicht legal, wohl aber z.B. in AT.)
Alternativ
kann diese Funktion auch ein PAS Sensor (pedal assistent system) übernehmen.
Dieser misst z.B. die Geschwindigkeit der Tretbewegung an der Tretkurbel und
steuert abhängig von der Trittgeschwindigkeit ebenfalls den Motor von Null bis
zur Maximalgeschwindigkeit. (Je schneller man tritt, desto schneller läuft auch
der Motor.)
Darüber
hinaus können an den Controller je nach Bauart noch weitere Teile angeschlossen
werden; wie etwa Bremsgriffabschalter, welche bei Betätigen der Bremse
automatisch den Stromfluss zum Motor unterbrechen; Stufenschalter, über welche
man verschiedene Maximalgeschwindigkeiten vorgeben kann; Tempomat- oder
„autocruise“ Schalter, welche eine Art Feststellfunktion für eine bestimmte
Motorgeschwindigkeit übernehmen; 6 km/h Taster, Akkustandsanzeiger, ggf. auch
Displays oder Bedienpanels mit weiteren Funktionen, usw.
Rechtlich
gelten Pedelecs als Fahrräder und sind somit versicherungs- und zulassungsfrei.
Es müssen jedoch folgende Bedingungen erfüllt sein: 1. Die
Unterstützung durch den Motor darf nur bis zu einer Geschwindigkeit von maximal
25 km/h erfolgen. 2. Die Nenndauerleistung des Motors
darf nur maximal 250 Watt betragen. 3. Die
Unterstützung durch den Motor darf nur dann erfolgen, wenn gleichzeitig
mitgetreten wird.
In einer
Testanordnung für den Selbstumbau sieht das Ganze dann z.B. wie auf dem
folgenden Bild aus. Hier kann man auch erkennen, was alles an das umzubauende
Fahrrad angebracht werden muss.

2. Die benötigten Bauteile
im Einzelnen
2.1 Motor
Fahrradmotoren
gibt es in den unterschiedlichsten Ausführungen. Üblich sind inzwischen
bürstenlose Drehstrommotoren, die über einen Controller angesteuert werden, der
den Gleichstrom des Akkus in passenden und regelbaren Drehstrom umwandelt.
Diese
Motoren gibt es sowohl für den Fronteinbau als auch für den Hinterradeinbau.
(Des weiteren gibt es auch Mittelmotoren, die direkt an der Tretkurbel
angebracht sind. Deren Vorteil liegt darin, das für die Kraftentfaltung des
Motors die Gangschaltung des Fahrrades mitgenutzt werden kann, was insbesondere
bei größeren Steigungen Vorteile verspricht.)
Für den
eigenen Umbau eignen sich in der Regel aber nur Front- und ggf. auch
Hinterradmotoren, wobei der Einbau von Frontmotoren einfacher als der von
Hinterradmotoren ist. Daher beschränkt sich diese Darstellung in erster Linie
auf den Einbau von Frontmotoren.
Fahrradmotoren
gibt es mit und ohne Getriebe. Die Motoren mit Getriebe sind meist leichter als
die getriebelosen und haben in der Regel einen Freilauf. Dadurch sind sie für die
meisten Anwendungen besser geeignet als die schwereren getriebelosen („direct
drive“) Motoren. Hauptnachteile der Getriebemotoren sind die fehlende
Rekuperationsfähigkeit (Energierückspeisung beim Bremsen) und der höhere
Verschleiß, da die Getriebe gewöhnlich Plastikzahnrädchen enthalten. Daher
sollten diese Motoren nicht mit sehr viel höheren Leistungen als den
angegebenen betrieben werden. Der Schleppverlust beim passivem Mitdrehen eines
250 Watt Freilaufmotors dürfte bei 25 km/h bei ca. 1 - 2 Watt liegen, der eines
Direktmotors bei ca. 4 - 8 Watt.
Beide
Motorentypen gibt es mit und ohne Hallsensoren; die Motoren mit Hallsensoren
lassen sich meist etwas feinfühliger bzw. ruckelfreier ansteuern, sind aber
auch etwas störanfälliger.
Ferner
gibt es die Motoren in unterschiedlichen Spannungsklassen; gewöhnlich mit 24V,
36V oder 48V. Eine höhere Motorspannung bedeutet dabei keineswegs eine höhere
Geschwindigkeit. Gewöhnlich sind alle Motoren bei der jeweiligen
Betriebsspannung und in der jeweiligen Radgröße zum Erreichen einer
Geschwindigkeit von 25 km/h ausgelegt. Mit einem 24V Motor kommt man bei 24V
also ebenso auf eine Geschwindigkeit von 25 km/h wie z.B. mit einem 48V Motor
bei 48V. Der Hauptvorteil höherer Spannungen liegt darin, das nach dem Zusammenhang
Leistung gleich Spannung mal Strom bei höherer Spannung zum Erreichen der
gleichen Leistung eine geringere Stromstärke erforderlich ist (P = U x I; z.B.
250 Watt = 10,4 A x 24 V oder 5,2 A x 48 V). Dies ermöglicht die Verwendung
dünnerer Leitungen bzw. verringert bei gleichen Kabelquerschnitten die
Leitungsverluste.
Für die
meisten Anwendungen dürfte ein 36V 250 Watt Front- (oder ggf. Heck-)Motor mit
Getriebe in Kombination mit einem Controller, der max. ca. 12 A liefert, am
zweckmäßigsten sein. Mit diesem lässt sich bequem eine Geschwindigkeit von 25
km/h in der Ebene erreichen und lassen sich (bei geringerer Geschwindigkeit)
Steigungen bis etwa 7 % bewältigen.
Auf dem
ersten und zweiten Bild sind solche 250 Watt Getriebemotoren von „Bafang“ zu
erkennen. Den Bafang Motor gibt es sowohl mit als auch ohne Hallsensoren.
Motoren mit Hallsensoren haben gewöhnlich 3 dicke Kabel für die Motorphasen und
5 dünne Kabel für die Hallsensoranschlüsse. [Motoren ohne Hallsensoren haben
demnach nur 3 Anschlüsse für die Motorphasen. (Hat ein Motor nur 2 Anschlüsse,
so handelt es sich vermutlich um einen Bürstenmotor („brushed“), der auch einen
völlig anderen Controllertyp benötigt.)]
Die
Getriebemotoren gibt es mit unterschiedlichen Übersetzungverhältnissen. Die
nachfolgend auf dem ersten und zweiten Bild zu erkennenden Motoren sind
Getriebemotoren mit einem einstufigen Planetengetriebe; sie haben ein
Übersetzungsverhältniss von ca. 1:4...1:5.
Auf dem
dritten und vierten Bild sind Motoren mit einem zweistufigen Getriebe mit einem
Übersetzungsverhältniss von ca. 1:11...1:15 zu erkennen. Durch die höhere
Drehzahl des internen Rotors haben diese Motoren bei gleichem Gewicht eine
höhere Leistung; bzw. sind bei gleicher Leistung kleiner und/oder leichter. In
der Praxis ist allerdings zu beachten, das nicht alle Controller die interne
Drehzahl des Motor erzeugen können.
Zu
Beachten ist, das die Motoren leider nicht 100%ig wasserdicht sind. Es
empfiehlt sich also zum einen, Kabeldurchtrittsöffnungen und Lager etwa mit
einem Kettenabschmierfett o.dgl. abzudichten, zum anderen das Rad möglichst
überdacht abzustellen.

250 Watt Bafang mit einstufigem
Getriebe und ca. 3 KG Gewicht

500 Watt Bafang mit einstufigem
Getriebe und ca. 4,5 KG Gewicht

250 Watt high torque Tongsheng
Motor mit zweistufigem Getriebe und ca. 2 KG Gewicht

500 Watt high torque Tongsheng
Motor mit zweistufigem Getriebe und ca. 3 KG Gewicht
2.2 Controller
Controller
gibt es ebenfalls in den verschiedensten Ausführungen und Leistungsklassen. Es
gibt programmierbare [siehe unten] und nicht programmierbare, Controller mit
und ohne Anschlüssen für Hallsensoren, 3-Stufenschalter,
Geschwindigkeitslimits, Bremsgriffabschalter, Geschwindigkeitshaltefunktionen,
Displays [s.u.], Möglichkeit der Rekuperation, Controller für Bürstenmotoren
usw.
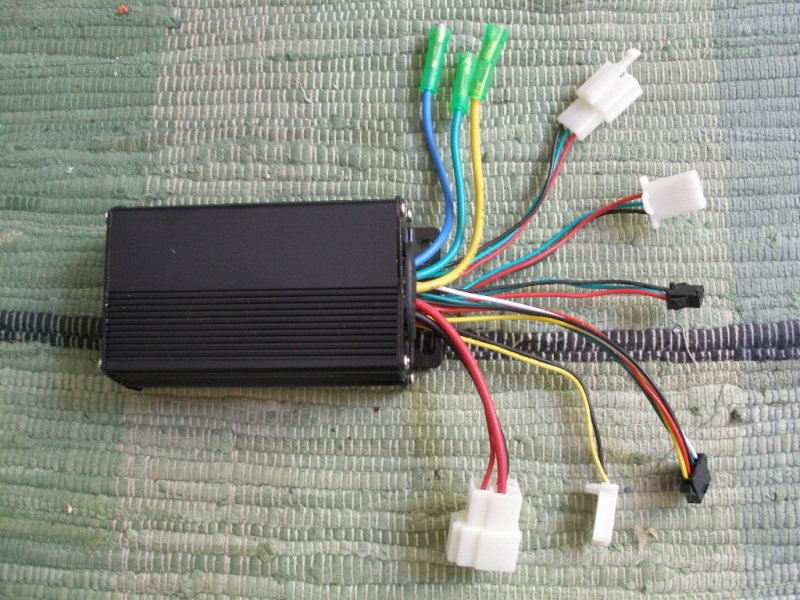
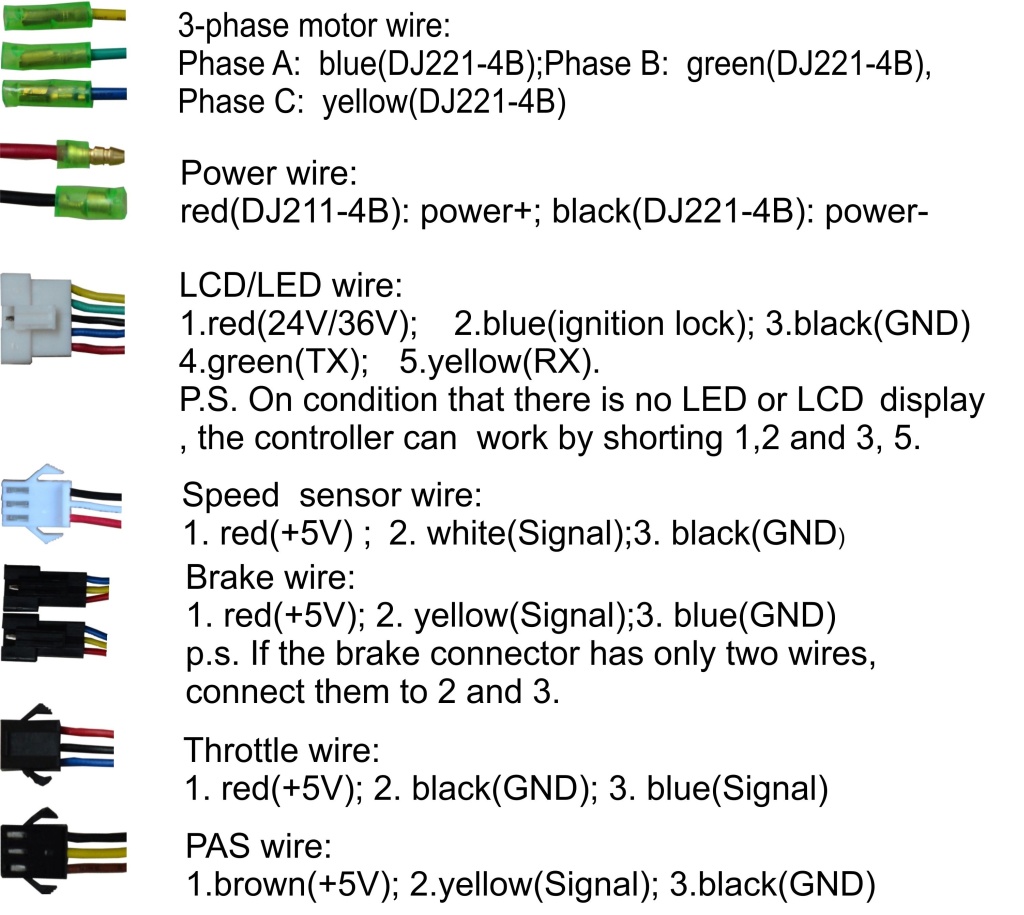
Die
geläufigsten Controller sind (nur) für bürstenlose Motoren („brushless“)
geeignet und haben die folgenden Anschlüsse:
-
die drei Motorphasen; drei dicke Kabel in gelb, blau und
grün [im nachfolgenden Bild oben]
-
den Akku; mit einem dicken schwarzen Kabel (Gnd, 0V, Minus)
und einem dicken roten Kabel (+36V, Plus) [zweite von oben]
-
den Gasgriff oder Daumengashebel mit drei Anschlüssen (throttle);
schwarz für Gnd, 0V, rot für +5V und grün (oder blau) für das Signal. Hier kann
nur ein „normaler“ Gasgriff oder Daumengashebel mit 3 Anschlusskabeln
angeschlossen werden. An die Signal- und die +5V Leitung kann parallel ein
Taster + Widerstand in Serie angeschlossen werden, um bspw. einen 6 Km/h Knopf
zu erhalten. [Taster + 10k = ca. 20 %, + 8,2k = ca. 40 % der
Maximalgeschwindigkeit.]
-
den PAS Sensor mit drei Anschlüssen; schwarz für Gnd, 0V,
rot für +5V und grün oder blau oder lila für das Signal, für Sensoren mit
gepulstem Signal
-
ggf. einen weiteren Anschluss mit 3 Polen für einen
Drei-Stufenschalter für Geschwindigkeitsbegrenzungen (3 speed)
-
bei Motoren mit Hallsensoren mit einem 5poligem Anschluss
für die Hallsensoren; schwarz, rot, gelb, grün und blau. Viele Controller haben
eine dual mode Funktion, die Hallsensoren können, müssen aber nicht
angeschlossen werden
-
ggf. einem Anschluss für eine autocruise oder Tempomat -
Funktion. Sind die Kabel gesteckt, so hält der Motor nach 10 Sekunden die vorgegebene
Geschwindigkeit bei; durch eine erneute Betätigung des Gasgriffs wird das
System resettet [autocruise]
-
ein oder zwei 2polige Anschlüsse für einen
Bremsgriffabschalter; schwarz und weiss (oder schwarz und gelb). Sind die Kabel
verbunden; ist der Motor aus [L-brake] Gg. ist hier auch noch ein drittes meist
rotes Kabel mit +5V vorhanden (H-brake)
-
ggf. einen zweipoligen Anschluss zum Ein/Auschalten des
Systems (ignition)
Die
meisten Controller funktionieren so, das das Signal von Gasgriff und PAS unabhängig
voneinander den Motor ansteuern. (Oder Verknüpfung.) Der Motor lässt sich also
völlig unabhängig voneinander sowohl durch den Gasgriff als auch den PAS Sensor
ansteuern. [Gasgriff = 1, PAS = 0 => Motor = 1 || Gasgriff = 0, PAS = 1
=> Motor = 1 || Gasgriff = 1, PAS = 1 => Motor = 1 || Gasgriff = 0, PAS =
0 => Motor = 0 || Gasgriff = 0,5, PAS = 0 => Motor = 0,5 || Gasgriff = 0,
PAS = 0,5 => Motor = 0,5]
Es reicht
demnach also aus, neben Akku und Motor z.B. nur einen Gasgriff anzuschließen.
Oder alternativ nur Akku + Motor + PAS.
Soll der
Motor nur dann durch den Gasgriff ansteuerbar sein, wenn getreten wird (also
der PAS Sensor aktiv ist), benötigt man eine Zusatzfunktion oder ggf. -bauteil;
s.u. „Gasgriff-Freischalter“.

Einen
Schaltplan für diesen Controller gibt es auch hier und für einen KU65 hier.
{kind=link}
{kind=link}
Auf dem
Bild unten ist ein programmierbarer sensorloser Controller zu sehen mit
Anschlüssen für [von oben nach unten]
-
die drei Motorphasen; drei dicke Kabel in gelb, blau und
grün
-
einen Drei-Stufenschalter [1. Stufe: sw mit rot verbunden, 2.
Stufe: alle offen; 3. Stufe: sw mit grün verbunden]
-
den Gasgriff
-
den PAS Sensor
-
das Programmierkabel
-
einen Bremsabschalter
-
den Akku
Programmierbare
Controller sind insbesondere dann zu empfehlen, wenn man den Akkustrom auf
einen bestimmten Wert begrenzen will, die Unterspannungsabschaltung genau dem
Akku anpassen will (wenn dieser kein BMS hat) oder um genau definierte Stufen
für Geschwindigkeitslimite vorzugeben. So hat z.B. der vielfach benutzte
Standard Controller KU63 / 36V ein Strombegrenzung von 15 Ampere, eine
Unterspannungsabschaltung von 27,5 Volt und feste Geschwindigkeitsstufen. Nun
kann aber ein Strom von 15 Ampere (dies entspricht bei 36V einer Leistung von
540 Watt für einige Motoren oder um eine möglichst große Akkureichweite zu
erhalten, zu viel sein. Oder es würde die Unterspannungsabschaltung von 27,5
Volt für einen 36V Akku ohne interne (Batterie Management System gesteuerte)
Abschaltung zu einer Tiefentladung des Akkus führen. Oder man will z.B. einen
36 Volt Akku mit BMS, der immer bei BMS vorgegebenen z.B. 31 Volt abschaltet,
zur Verlängerung der Lebensdauer nur bis minimal 33 Volt entladen. Oder man
will das Fahrrad genau auf eine Maximalgeschwindigkeit von 25 km/h (oder 27
km/h) einstellen. Auch können viele programmierbare Controller rekuperieren,
d.h. beim Bremsen Energie in den Akku zurückspeisen. ... . In all diesen Fällen
ist die Verwendung eines programmierbaren Controllers sinnvoll. Programmierbare
Controller in der hier gezeigten Ausführung gibt es sowohl mit Anschlüssen für
Hallsensoren als auch ohne [Bild]. Die programmierbaren Controller mit
Hallsensoren funktionieren im Gegensatz zu vielen anderen
(Universal-)Controllern wie dem KU63 nur mit Hallsensor-Motoren. Die
sensorlosen programmierbaren Controller funktionieren natürlich mit sämtlichen
brushless (3 Phasen) Motoren.

Weitere
Hinweise gibt es auch hier.
Zur
Programmierung gibt es auch eine open source Software:

Weitere
Hinweise und die Software zum Download gibt es hier (externer
link, download zulassen).
Weiterhin
gibt es inzwischen sehr gute Controller mit der Möglichkeit, Displays
anzuschließen, über welche die verschiedensten Funktionen und Parameter
eingestellt und abgelesen werden können. Hier besteht auch die Möglichkeit
einer echten Leistungssteuerung, d.h. alternativ zu Geschwindigkeitsstufen kann
stufenweise die maximale Leistung des Gesamtsystems eingestellt werden. [Im
folgendem Beispiel etwa max. ca. 80, 150, 250, 350, 500 Watt.]
Da diese
Controller auch ganz normal wie die zuvor beschriebenen Controller ohne Display
betrieben werden können, hat man mit diesem Controllertyp ein sehr vielfältiges
Spektrum an Einsatzmöglichkeiten. [Hierfür muss am Displayport blau und rot
gebrückt werden bzw. ein Jumper gesteckt werden, siehe hier. Allerdings kann
man so die Leistungssteuerung nicht nutzen, denn wie will man bei Steuerung nur
über einen Gasgriff oder PAS Sensor, welcher das Geschwindigkeitssignal
vorgibt, die Leistungsstufen aufrufen.]
{kind=link}
250 Watt
Controller, den man entweder ganz normal nutzen kann, oder an den man am oberen
Stecker auch ein Display anschließen kann*.
[Die weiteren Anschlüsse von oben nach
unten: PAS, Gasgriff, Geschwindigkeitssensor, Autocruise bzw. Tempomat**, Akku,
Motor, Bremsgriffe.]
{kind=link}
* Durch Brücken
etwa mit einem jumper von rot und blau im Displayanschluss kann der Controller
auch ohne Display eingeschaltet werden
** Gesteckt;
dann ist nach Neustart eine Tempomatfunktion aktiviert; nach 10 Sekunden wird
eine bestimmte Geschw. beibehalten.

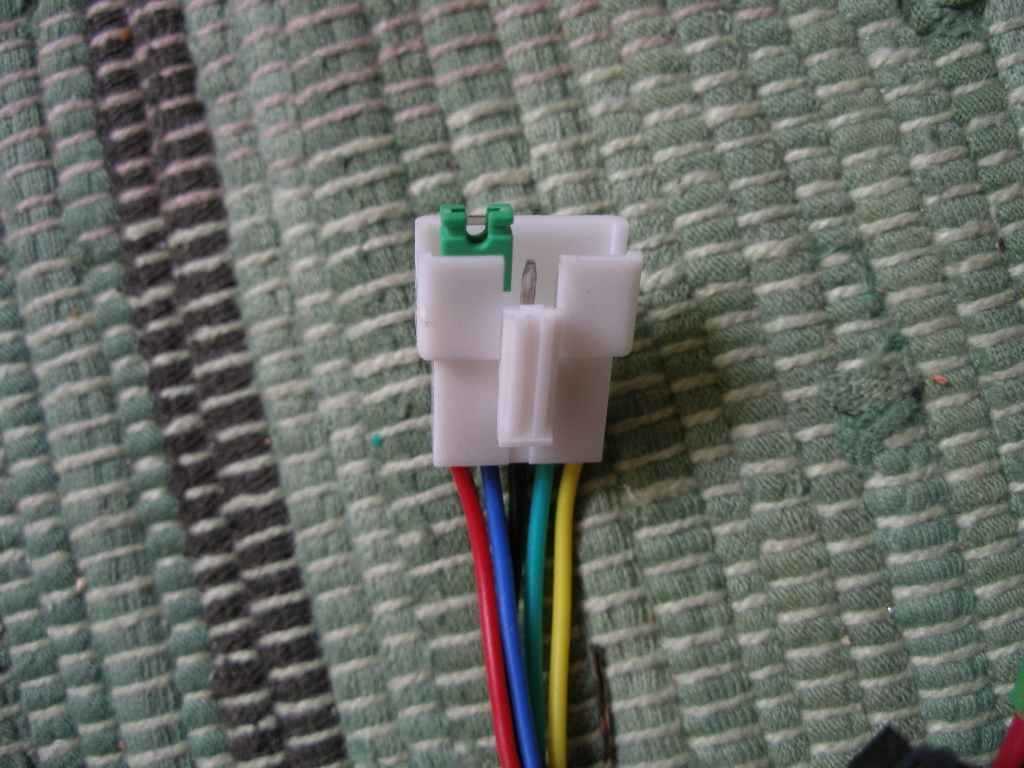
Display, mit
welchem wahlweise u.a. 5 Geschwindigkeits- oder 5 Leistungsstufen [„Assist“]
und weitere Funktionen ähnlich einem Fahrradcomputer eingestellt werden können.
Die Anzeige
zeigt ansonsten noch die Geschwindigkeit, die Entfernung, die Fahrzeit und (leider
sehr ungenau) den Akkustand an.
Weitere
Informationen dazu auch hier
(Anleitung), hier (erweiterte
Anleitung) und hier (Unterspannungsabschaltung).

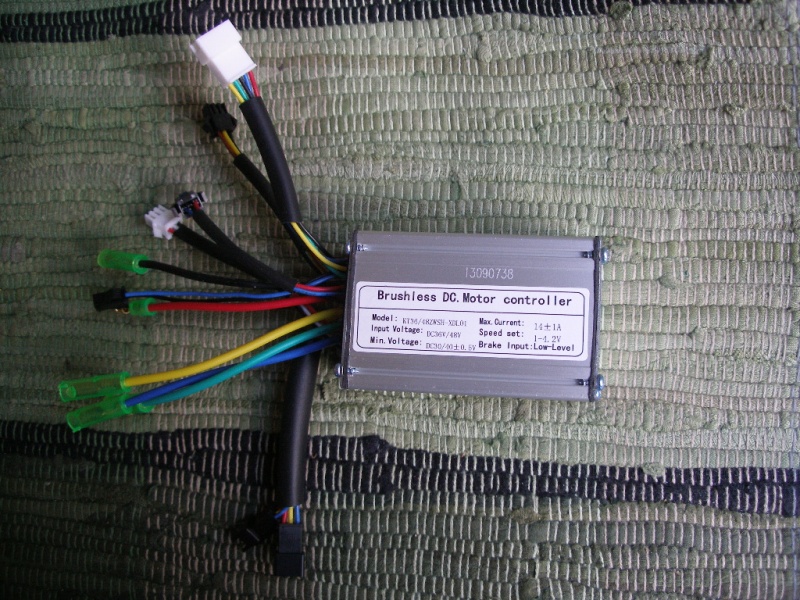
250 Watt
Sinus Controller, den man entweder ganz normal nutzen kann, oder an den man am
oberen Stecker auch ein Display anschließen kann.
[Anschlüsse
von oben nach unten: Motor, Akku, PAS, Gasgriff, Display*,
Hall+Geschwindigkeitssensor, Geschwindigkeitslimit, 2x Bremsgriffabscchalter.]
* Durch Brücken
von rot und braun im Displayanschluss kann der Controller auch ohne Display
eingeschaltet werden

LED Display,
mit welchem wahlweise u.a. 5 Geschwindigkeits- oder 5 Leistungsstufen oder auch
Kombinationen daraus eingestellt werden können.
Weiterhin
zeigt lässt sich rechts (ungenau) der Akkustand ablesen. Durch längeres Drücken
der obersten Taste (W) lässt sich eine 6 km/h Funktion betätigen.
Vorteilhaft
ist des weiteren die Verwendung eines sogenannten Gasgriff Freischalters, der
die Vorteile von Pedelecsensor und Gasgriff kombiniert bzw. den legalen Betrieb
eines Gasgriffs in Deutschland überhaupt erst möglich macht. Der Freischalter
funktioniert so, dass sobald getreten wird, über den Tretsensor der Gasgriff
freigegeben wird. Es kann also immer [und auch nur] bei Treten der Motor
individuell von 0 bis volle Leistung reguliert werden kann. Man kann dadurch
z.B. über weite Strecken auch ganz ohne Motor fahren [was bei angeschlossenem
Tretsensor sonst nicht geht], oder man kann auch bei ganz geringer
Geschwindigkeit bzw. Trittfrequenz schon die volle Motorleistung abrufen. Der
Gasgriff Freischalter kann als Zusatzbauteil vergleichsweise einfach in den
Controller eingebaut werden. [Gasgriff = 1, PAS = 0 => Motor = 0 || Gasgriff
= 0, PAS = 1 => Motor = 0 || Gasgriff = 1, PAS = 1 => Motor = 1 ||
Gasgriff = 1, PAS = 0,05...1,0 => Motor = 1 || Gasgriff = 0,5, PAS =
0,05...1,0 => Motor = 0,5 || Gasgriff = 0,2, PAS = 0,05...1,0 => Motor =
0,2]

Weitere
Hinweise zum Anschluss hier
Ggf. kann
auch zwischen Akku und Controller eine sogenannte „Antiblitzschaltung“
eingebaut werden, die den hohen Einschaltstrom (Laden der Kondensatoren in dem
Controller) und damit Abbrennen der Steckerkontakte verhindert, wenn der
Controller nicht über einen zusätzlichen Schalter (kleiner +36V Draht am
Akkuanschluss) eingeschaltet wird. (Der kleine +36V Draht ist dann fest mit dem
+36V Anschluss verbunden; Bauteile Antiblitzschaltung: Z.B. IRF 4110, 47µF,
22k, 56k.)

2.3
Kombination von Motor und Controller
Da öfter
Fragen nach der Geschwindigkeit des Elektrofahrrades auftauchen, hier einige
grundsätzliche Bemerkungen:
Gewöhnlich
sind die Motoren auf eine Geschwindigkeit von 25 km/h ausgelegt, da dies der
gesetzlichen Vorgabe in vielen Ländern entspricht.
Dies
bedeutet bei einem 28 Zoll Rad eine Nenndrehzahl von ca. 200 U / min [200 U /
min x 2,185 m Radumfang x 60 = 26 220 m / h (= 26,2 km/h)], die der Motor bei
der Nennspannung von z.B. 36 Volt erreicht. Bei einem 20 Zoll Rad ist zum
Erreichen der gleichen Geschwindigkeit eine Nenndrehzahl von ca. 280 U / min
erforderlich [280 U / min x 1,530 m Radumfang x 60 = 25 704 m / h].
Baut man
einen eigentlich für 25 km/h vorgesehenen „20 Zoll Motor“ mit 280 U / min in
ein 28 Zoll Rad ein, erhält man eine Geschwindigkeit von ca. 37 km/h [280 U /
min x 2,185 m Radumfang x 60 = 36 708 m / h]. Allerdings mit einem über den
ganzen Geschwindigkeitsbereich niedrigerem Drehmoment (Antriebskraft). Ebenso
kann man z.B. einen 36 Volt / 28 Zoll Motor mit 200 U / min z.B. auch mit 43
Volt betreiben, dann kommt man ebenfalls auf eine (proportional) zur höheren
Spannung höheren Geschwindigkeit (und höheren Leistungsaufnahme). [200 U / min
x 43/36 x 2,185 m Radumfang x 60 = 31 318 m / h]. Das Drehmoment ist hier bei
vergleichbarer Geschwindigkeit gleich. Umgekehrt kann man natürlich auch einen
„28 Zoll Motor“ mit 200 U / min in ein 20 Zoll Rad einbauen und kommt dann bei
höherem Drehmoment auf eine Geschwindigkeit von ca. 18 km/h [200 U / min x
1,530 m Radumfang x 60 = 18 360 m / h].
Der Controller ermöglicht im
Normalfall das Erreichen dieser Maximalgeschwindigkeiten. Die
Maximalgeschwindigkeit wird also völlig unabhängig von der Art des Controllers
erreicht und kann durch die Wahl eines anderen Controllers normalerweise auch nicht
verändert (erhöht) werden. Bei den meisten Controller können jedoch durch
Stecken von Geschwindigkeitslimits oder Einprogrammieren von
Geschwindigkeitsstufen Geschwindigkeiten unterhalb der Maximalgeschwindigkeit
eingestellt werden. Auch mit programmierbaren Controllern kann diese
Maximalgeschwindigkeit nicht (oder allenfalls in einem „Experimental-Modus“ um
vielleicht noch 10 %) erhöht werden.
Motoren ohne Hallsensoren können
nur an sensorlose Controller oder Universalcontroller angeschlossen werden. Ein
Anschluss an Hallsensorcontroller ist nicht möglich.
Motoren mit Hallsensoren (3
Motorphasen und 5poliger Hallanschluss) können sowohl an Hallsensorcontroller
als auch an sensorlose Controller (sowie Universalcontroller) angeschlossen
werden. Der Anschluss an Hallsensorcontroller verspricht eine etwas
feinfühligerer und ruckelfreiere Ansteuerung insbesondere beim Anfahren, da der
Controller nicht erst die Stellung des Motors suchen muss. Es ist aber auch ein
Anschluss von Hallsensormotoren an sensorlose Controller möglich, wodurch man
sich 5 Käbelchen und eine mögliche Fehlerquelle erspart, da kein möglicher
Defekt der Hallsensoren wirksam werden könnte, da diese ja nicht verwendet
werden. Erkauft wird dies mit dem beschriebenen etwas schlechterem Ansteuerverhalten
des Motors.
Neben der Wahl der richtigen
Geschwindigkeit ist es ebenso wichtig, für die Leistung des Motors einen
Controller mit der passenden Leistung auszuwählen. Oft liefern die angebotenen
Controller zu viel Leistung, was nur zu einem niedrigeren Wirkungsgrad und
schnellerem Verschleiß des Motors führt. So macht es z.B. wenig Sinn, einen 36V
/ 250 Watt Getriebemotor mit einem 36V / 18A Controller zu kombinieren, da
dieser den Motor mit einer zu hohen Eingangsleistung von bis zu 650 Watt versorgen
würde. (Was insbesondere den Plastikzahnrädchen des Getriebes auf Dauer nicht
gut bekommen würde.)
Die Leistung eines Controllers
berechnet sich grundsätzlich aus dem Produkt von Spannung mal Stromstärke.
Damit hat z.B. ein Controller mit einem maximalen Strom von 15 Ampere bei 24
Volt eine Leistung von (max.) 360 Watt (24V x 15A = 360W), ein 36V Controller
mit 15A jedoch von 540 Watt (36V x 15A = 540W). Leider sind die Angaben auf
einem Controller oft nicht stimmig; z.B. kann ein Controller, der mit 36V und
15A gelabelt ist, kein 250 Watt Controller sein. Meist ist in diesen Fällen das
Produkt aus Strom x Spannung der richtigere Wert und ist die Leistungsangabe
unzutreffend.
Bevor man
den Motor fest in das Fahrrad einbaut, empfiehlt es sich, vorab alles in einer
Art Testanordnung wie der Folgenden auszuprobieren, da nicht unbedingt damit zu
rechnen ist, das alles auf Anhieb funktioniert. Hierzu werden an dem Controller
der Motor über die 3 Motorphasen (+ ggf. die Hallphasen); der Akku über den Akkuanschluss
sowie einen Gasgriff und ggf. der PAS Sensor angeschlossen. Bei manchen
Controller - Motor Kombinationen kann es sein, das bei den Motorphasen und/oder
Hallsensorphasen die Farben gelb und blau gegeneinander vertauscht werden
müssen.
Der Motor lässt
sich nun unabhängig voneinander sowohl nur durch den Gasgriff als auch nur
durch den Tretsensor (Vorbeiführen der Magnete an dem Sensor) von Null bis Max.
ansteuern. Es reicht aus, nur eins von den beiden Steuerelementen Gasgriff oder
Tretsensor anzuschließen, also z.B. nur den Tretsensor. [Wichtig, es passt
leider nicht jeder Tretsensor zu jedem Controller, da die Signalauswertung auf
unterschiedlichen Weg erfolgen kann, s.u.]
Ganz
wichtig: Auf keinen Fall beim Anschließen an den Akku den Pluspol + (meist rot)
und den Minuspol – (meist schwarz) verwechseln, sonst ist der Controller sofort
hinüber! Ebenso ist zu beachten, das es manchmal auch unterschiedliche
Kabelbelegungen in den Chinasteckern gibt.
2.4
Kombination von Akku und Controller
Von einer
gewissen Bedeutung ist auch die Kombination von Akku und Controller. Ganz wichtig
ist natürlich, das der Akku keine höhere Spannung als die Maximalspannung des
Controllers hat. So kann man bspw. an einen 24V Controller nicht einfach einen
36V Akku [vollgeladen = 42V] anschließen, da in dem 24V Controller z.B.
Kondensatoren verbaut sein können, die nur bis zu einer Maximalspannung von 35V
ausgelegt sind.
Dann ist
insbesondere darauf zu achten, das der Akku auch die für den Controller
notwendige Stromstärke liefern kann. Dabei kann es mehrere limitierende
Faktoren geben; meistens wird es die maximale Auslegungsstromstärke des BMS
[Batterie Management System] sein, oft auch die maximale Strombelastbarkeit der
verwendeten Akkuzellen, zuweilen aber auch Faktoren wie etwa der Querschnitt
der internen Verkabelung. Wenn also das BMS bspw. nur für maximal 15 Ampere
ausgelegt ist, kann man an den Akku natürlich nicht einfach einen 22 Ampere
Controller anschließen. Oder wenn man ein Akkupack bspw. aus 3P Panasonic
NCR18650A Zellen baut, kann man nur einen Controller mit maximal ca. 15 Ampere
Stromentnahme verwenden, da die Zellen nur bis jeweils ca. 5 Ampere belastet
werden sollten. Hier ist ggf. auch die Wärmeentwicklung des Akkupacks in die
Überlegungen mit einzubeziehen. Ein 3P10S Akku aus NCR18650A Zellen hat bei 15
Ampere etwa 60 Watt Verlustleistung, ein 5P10S aus 18650VTC4 Zellen hingegen
nur ca. 10 Watt. [PVerlust = Rgesamt x I²; 1/Rgesamt
= (1/R) x n; n = Zahl der parallelen Zellen, R =
Gleichstrominnenwiderstand der einzelnen Zelle]
2.5 PAS („Pedal Assistent System oder Sensor“)
Der PAS
Sensor hat drei Anschlüsse, schwarz für Gnd [0V], rot für +5V und grün oder
blau für das Signal. Der metallerne Ring an dem Sensor dient zur Montage des
Sensors unter der Kunststoffabdichtung des Tretlagers. Die Magnetscheibe wird
auf die Tretkurbel gesteckt. Der Sensor muss so montiert werden, dass die
Magnete beim Treten auf die Spitze des Sensors zulaufen.
Der
Tretsensor steuert den Motor meist drehzahlabhängig an, d.h., je schneller
getreten wird, desto mehr Leistung gibt auch der Motor dazu.
Bei den
PAS Sensoren kann man im wesentlichen zwei verschiedene Typen von Sensoren
unterscheiden, sogenannte „digitale“ Sensoren und analoge Sensoren. Die
digitale Sensoren [V7] geben ein gepulstes Signal in Form einer
Rechteckspannung ab, deren Impulszahl von der Trittfrequenz abhängig ist. Die
analogen Sensoren [V5] geben eine trittfrequenzabhängige (linear) zunehmende
Spannung ähnlich einem Gasgriff ab.
Die
meisten Controller (u.a. vom Typ KU63, EBXXX, Controller mit Leistungsregelung
...) benötigen einen digitalen PAS Sensor mit einem gepulsten Signal. PAS
Sensoren mit gepulstem Signal funktionieren nur am entsprechenden Eingang des
Controllers; nicht am Gasgriffeingang. (Bzw. die entsprechenden Controller
funktionieren über den PAS Eingang nur mit einen gepulsten PAS Sensor.) PAS
Sensoren mit linearem Signal funktionieren gewöhnlich nur am Gasgriffeingang
und nicht am PAS Signaleingang der meisten Controller.
Manchmal
ist es so, das sich bei Ansteuerung des Motors über den Tretsensor eine etwas
geringere Geschwindigkeit ergibt als bei Ansteuerung über einen Gasgriff. Oft
kommt es auch zu einer als nachteilig empfundenen Nachlaufzeit von ca. 1 - 2 Sekunden.
Ferner
gibt es noch Unterschiede in der Anordnung der Magnete. Bei den hier gezeigten
Scheiben sind die Magnete radial angeordnet, d.h. aus der Ebene der Scheibe
heraus zeigt immer der gleiche Pol. Es gibt aber auch Scheiben, in dem die
Polung der Magnete in Drehrichtung angeordnet sind, also immer z.B. erst Nord-
und dann der Südpol an dem Sensor vorbei geführt wird.
Der Sensor
wird gewöhnlich auf der Kettenblattseite montiert. Hierfür wird die
Verschraubung des Tretlagers gelöst und die Blechmanschette samt Sensor
zusätzlich mit aufgeschraubt. Der Sensor kann durch Lösen einer kleinen
Schraube auf der Manschette aber auch gewendet werden, so das eine Montage auf
der linken Seite des Tretlagers möglich ist. (Die Magnete zeigen immer mit dem
gleichen Pol aus der Scheibe, so das die Drehrichtung der Scheibe egal ist.
Wichtig ist nur, das die Magnete immer auf die Spitze des Sensors zulaufen.)

PAS Sensor mit gepulstem Signal, V7 Serie plus Magnetscheibe mit 5
Magneten.
2.6 Gasgriff oder Daumengashebel
Der
Gasgriff oder Daumengashebel hat ebenso wie der PAS Sensor drei Anschlüsse,
schwarz für Gnd [0V], rot für die Stromversorgung mit +4,5V und grün oder blau
für das Signal. Das Signal ist jedoch im Gegensatz zu dem PAS-Sensor gewöhnlich
ein [analoges] Signal in Form einer linear ansteigenden Spannung, d.h. je mehr
der Gasgriff aufgedreht ist, desto höher ist die Signalspannung. Die Verwendung
eines Gasgriffs ist in Deutschland im Gegensatz etwa zu Österreich bei
Geschwindigkeiten über 6 km/h allerdings nicht bzw. nur in Kombination mit
einem Gagriff-Freischalter legal. Bei den meisten China Controllern kann er jedoch angeschlossen
werden und ist dann in Deutschland nur bei zusätzlichem Einbau dieses Bauteils
legal, welches den Gasgriff erst bei eigenem Mittreten freigibt. [Baut man
dieses Bauteil nicht ein, so lässt sich der Motor sowohl über den Tretsensor
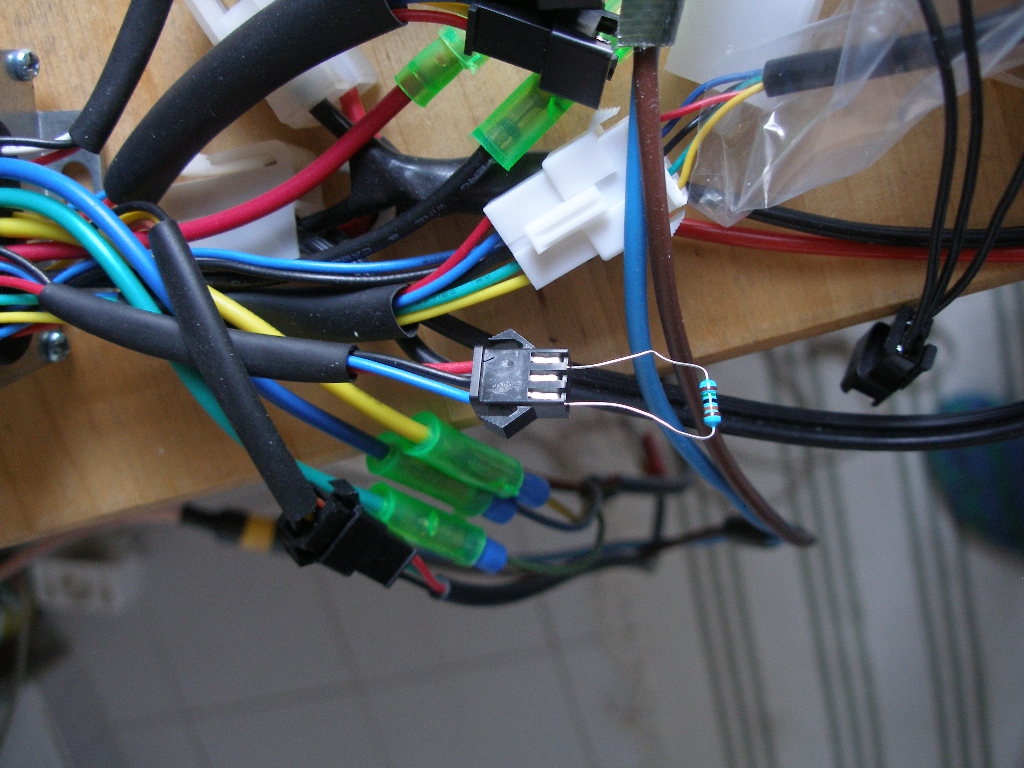
als auch über den Gasgriff unabhängig und parallel voneinander ansteuern.]
Die meisten Gasgriffe besitzen zwischen +4,5V (rot) und Gnd (schwarz)
einen Widerstand von ca. 2 kOhm. Über einen Magnet und einen Hallgeber wird an
dem Signalausgang (blau) durch Drehen eine variable Spannung zwischen ca. 1V
und 4V erzeugt. Dieser Spannungspegel ist das entscheidende Signal für die
Geschwindigkeit. Will man einen Gasgriff simulieren, so muss man den +4,5V und
Gnd Eingang durch zwei Widerstände in Serie brücken und kann dann zwischen den
Widerständen eine entsprechende Spannung abgreifen; z.B. bei zwei Widerständen
von 2,2k in Serie (4,4k zusammen) greift man in der Mitte eine Spannung von ca.
2,25V ab. Man kann ggf. (etwas unsauber) auch einfach einen sehr viel größeren
Widerstand von z.B. 10k...100k von +4,5V gegen den Signalausgang brücken [mit
hohen R anfangen!]; es stellt sich dann in Abhängigkeit der internen
Widerstände in dem Controller ebenfalls eine entsprechende Spannung ein. Von
einem Brücken von +4,5V gegen Signal mit zu kleinen Widerständen oder einem
Kurzschließen muss jedoch abgeraten werden, da sonst möglicherweise der
Controller Schaden nehmen könnte! Bilder dazu siehe hier und hier.
{kind=link}
{kind=link}

2.7 6 km/h Knopf
Ist diese nicht bereits im Controller
(mit Panel) implementiert, so kann diese Stufe auch bei Standard Controllern
einfach durch einen zusätzlichen Taster nachgerüstet werden. Parallel zum
Gasgriff wird der Taster mit einem ca. 10k Widerstand in Serie an +5V (rot) und
Signal (blau) angeschlossen. (Größerer Widerstand => geringere
Geschwindigkeit, kleinerer Widerstand => höhere Geschwindigkeit.) Der oben
gezeigte Gasgriff kann dazu auch seitlich geöffnet werden und dort eine
Kabelverbindung zum Taster gelegt werden.
2.8 Fahrradakku
Fahrradakkus
sind fast eine Wissenschaft für sich. Ich baue diese selber und führe sie immer
lose im Gepäck mit. Je nach Fahrstrecke kann man so Akkus mit verschiedener
Reichweite mitnehmen. Der kleinere Akku rechts im Bild hat eine Nennkapazität
von ca. 180 Wh [16 x Panasonic NCR18650A], was für eine tägliche Fahrstrecke
von bis zu ca. 20 km ausreicht. Das Gewicht dieses Akkus beträgt nur 0,85 Kg
bei einem Volumen von 0,5 L. Der mittlere Akku hat bei 1,8 Kg Gewicht eine
Nennkapazität von 400 Wh [36 x NCR18650A], der große Akku bei 2,9 Kg von 560 Wh
[60 x Sanyo 18650F]. Weitere Informationen zu Akkus gibt es hier: Selbstbauakkus
| Allgemeines
zu Akkus.

3. Beschreibung der Montageschritte
3.1 Montage des
(Front)Motors
Der Motor wird im Prinzip wie eine
normale Vorderradnabe in die Gabel eingebaut. Die Gabelenden müssen dazu ggf.
etwas aufgefeilt werden.
Zur Aufnahme der Gegenkräfte der
Motorachse (über die das Drehmoment des Motors auf die Gabel übertragen wird),
dienen zwei sogenannte Nasenscheiben. Hier kann man zusätzlich noch weitere
Drehmomentstützen, die es in den verschiedensten Bauformen gibt, montieren. Um
ein Schleifen des Motorgehäuses an den Ausfallenden der Gabel zu vermeiden,
müssen u.U. auch noch die Schrauben für die Schutzblechbefestigung o.dgl.
leicht abgefeilt werden.


3.2 Montage des Tretsensors
Der
Tretsensor und die dazugehörige Magnetscheibe werden am Tretlager montiert; aus
optischen Gründen vorzugsweise auf der Kettenblattseite. Hierfür muss mittels
eines Abziehers die Tretkurbel mit dem Kettenblatt entfernt werden. [Bei dem
abgebildeten Sensor ist es wichtig, darauf zu achten, dass die Magnete beim
Treten auf die Spitze des Sensors zulaufen. Ansonsten gilt, probieren Sie vor
der endgültigen Montage des PAS Sensors / Magnetscheibe am besten zunächst per
Hand aus, ob alles funktioniert. (Drehen der Scheibe über den Sensor.)
Es gibt
nämlich immer 4 Möglichkeiten der geometrischen Ausrichtung, von denen aber nur
eine funktioniert. (Scheibe mit der Oberseite, oder um 180 ° gedreht mit der
Unterseite zum Sensor gerichtet, Magnete der Scheibe im Uhrzeigersinn oder
gegen den Uhrzeigersinn an dem Sensor (Stift) vorbei drehend.)
Daher kann
der Sensor (zumindest das längliche rote Modell) entweder durch Wenden des
Sensors oder der Magnetscheibe sowohl rechts als auch linksseitig montiert
werden. [Auf dem ersten Bild unten würde sich die Magnetscheibe
also rechts herum drehen.]
Zur
Montage des Sensors wird die Kunststoffabdichtung des Tretlagers entfernt und
die Ring-Manschette anschließend mitsamt dem Sensor zwischen Abdichtung und dem
Tretlagergehäuse montiert. Oft ist hier jedoch eine Eigenkonstruktion besser
oder notwendig, wo man entsprechend den Gegebenheiten des Fahrrades etwas
improvisieren muss [nachfolgende Bilder].





Wenn eine Montage auch der
Magnetscheibe nicht möglich ist, können bspw. die einzelnen Magnete auch auf
das Kettenblatt aufgeklebt werden.
3.3 Montage des Controllers
Der Controller kann an den
unterschiedlichsten Stellen des Fahrrades untergebracht werden. Es ist sowohl
eine feste als auch eine lose Anbringung möglich.
Von mir wird eine Anordnung
bevorzugt, bei der der Controller unter dem hinteren Gepäckträger (und einem
darauf befindlichen Korb) fest verschraubt oder verklemmt wird.
Bei einer festen Anbringung
sollten die Steckerverbindungen gegen solche aus fest verlöteten Verbindungen
getauscht werden, was eine geringere Störanfälligkeit verspricht.


Schalter wie für das
Geschwindigkeitslimit oder für Geschwindigkeitsstufen können auch in den
Controller integriert werden:

3.4
Verlegung der Kabel
Die Kabel werden
zum Teil entlang der Rahmenrohre verlegt und mit Kabelbindern, vorhandenen
Schellen oder Klebeband fixiert. Zwischen Tretlager und Gepäckträger ist bei
hinterer Anbringung des Controllers auch eine vergleichsweise unauffällige
Verlegung unter dem Schutzblech möglich. Dies muss zur Befestigung der Kabel
allerdings angebohrt und ggf. etwas aufgebogen werden. Die Kabel sind hier
durch 9,5 mm² Schrumpfschlauch zusammengefasst. Da die Motoren (und u.U auch
Controller) nur eingeschränkt wasserdicht sind, gebe ich an die
Kabeleintrittsstellen an Motor und Controller meist noch etwas halbfestes
Kettenabschmierfett o.dgl..


3.5
Verbindung der Kabel
Die Kabel
sollten bei einem festen Anbau des Controllers statt durch die billigen und
auffälligen Chinastecker besser fest miteinander verbunden werden. Außerdem
muss ein Teil der Kabel verlängert werden. Dies geschieht vorzugsweise durch
Verlöten. Dazu werden die beiden Kabelenden abisoliert, miteinander verdrillt
und anschließend verlötet. Die elektrische Isolation erfolgt mit
Schrumpfschläuchen und/oder durch Klebeband.


3.6
Anschluss des Akkus
Der
Fahrradakku wird am besten mit XT60 Hochstromsteckern an den Controller angeschlossen
werden. Diese sind verpolungssicher und halten hinreichend fest.
Der Akku
kann dann z.B. im Rucksack mitgeführt werden und wird bei Abstellen des
Fahrrades einfach abgestöpselt und mitgenommen. Die Kabel müssen dafür
natürlich hinreichend lang bemessen sein.


Alternativ
ist auch möglich, den Akku in einer verschliessbaren Akkubox zu verstauen. Hierzu
können z.B. Geldkassetten verwendet werden. Diese wird mit U-Gewindestangen von
innen am Gepäckträger oder Rahmen verschraubt.


4. Bilder
einiger fertiger Umbauten
Auf den
Bildern sind Umbauten einiger älterer „Kellerfahrräder“ zu sehen.
Bei dem
oberen Fahrrad befindet sich ein Akku von 200 Wh im Gepäck, bei dem mittleren
F. befinden sich in dem Korb unterhalb des Rucksacks Akkus mit ca. 1,8 KWh
Kapazität.
Für den
gesamten Umbau sollte man schon einige Tage einplanen.






Copyright der erstellten Texte,
Fotos und Skizzen: Markus Gröbe
zurück | neuonline-shop | nach
oben | Akkubau | Akkus, Ladegeräte, BMS Systeme
| Punktschweißgerät | Einspeichen | Beleuchtung
| Links
| Spende
| Impressum